| Thread Previous • Date Previous • Date Next • Thread Next |
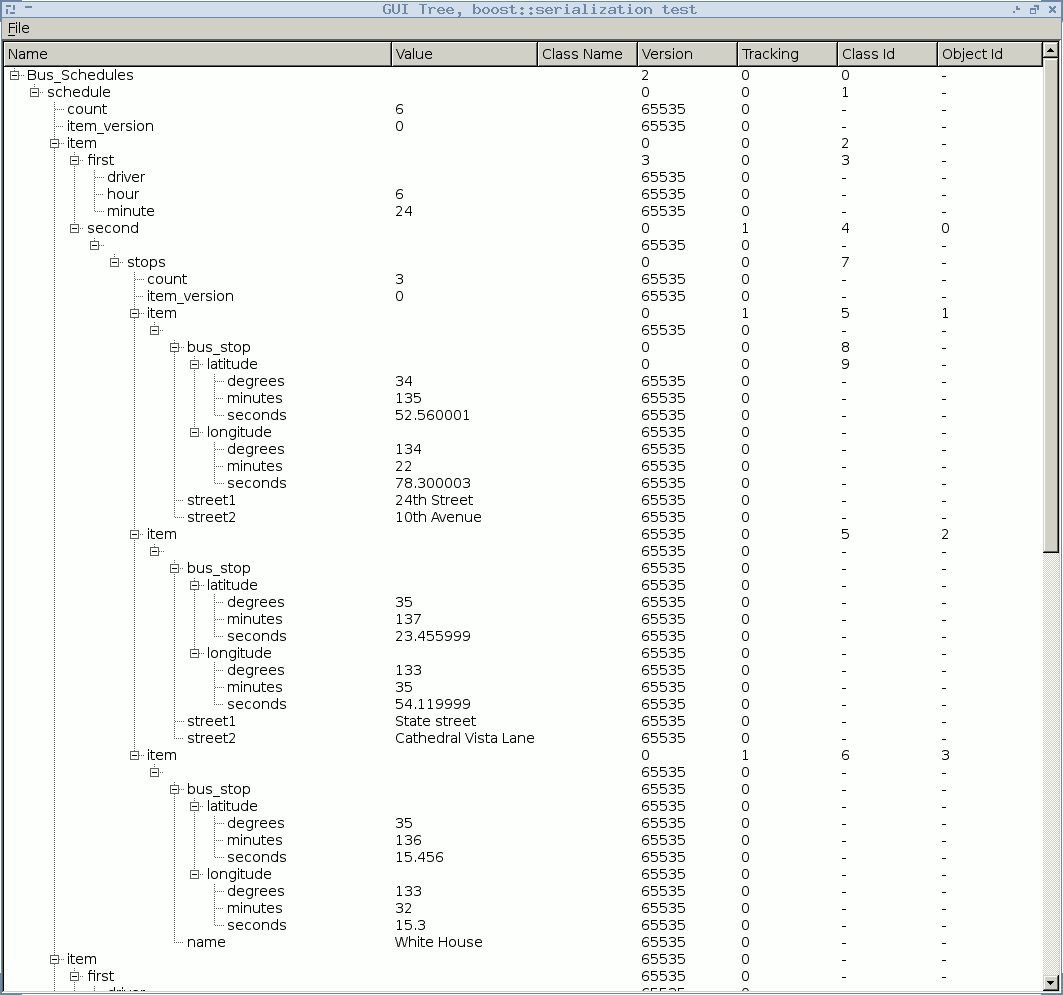
Hi, it starts to work. My last error was caused by linker, and I was unable to force the linker to find the right file, so I went around this problem, by putting the .cpp file inside .hpp. The problematic place is marked by line //////////// FIXME - a .cpp file? Another change was to flatten the tree. It was a bit too cumbersome for me right now to browse all the subfolders. I don't care how it should be done, main point right now was to get it to work. So least now we have a working example. You can run it by: make ./main Just be sure that you have qt4 development files installed, or it won't compile. When a window opens, click in the menu "File->Open". On the bottom of this dialog box pick "TXT boost::serialization files (*.txt)". Then open demofile.txt. That's how it works: The file is loaded for HDD with boost txt serialization, then the file is saved to QT with qt_tree serialization. It even doesn't work in opposite direction, just displaying. Cannot save. Last time (years ago) I started looking into qt3 tree view, but I haven't done it. If switching yade into qt4 turns out to be too difficult, then maybe we could change qt_tree.hpp to use qt3. Please at least have a look if my example works for you. Imagine - if we get this to work, we will have a browsable and unfoldable tree of Scene! Or any other object that you right-click (or something) in the QGLviewer window ;) best regards PS: the excessive columns "Version", "Tracking", etc.. are internal fields of boost serialization. And their display can be suppressed, in qt_tree.hpp:44 by returning 2. instead of 7 -- Janek Kozicki http://janek.kozicki.pl/
Attachment:
11-boost-serialization-tree-qt4.png
Description: PNG image
Attachment:
11-boost-serialization-tree-qt4.tar.bz2
Description: application/bzip
| Thread Previous • Date Previous • Date Next • Thread Next |
{kind=link}