| Thread Previous • Date Previous • Date Next • Thread Next |
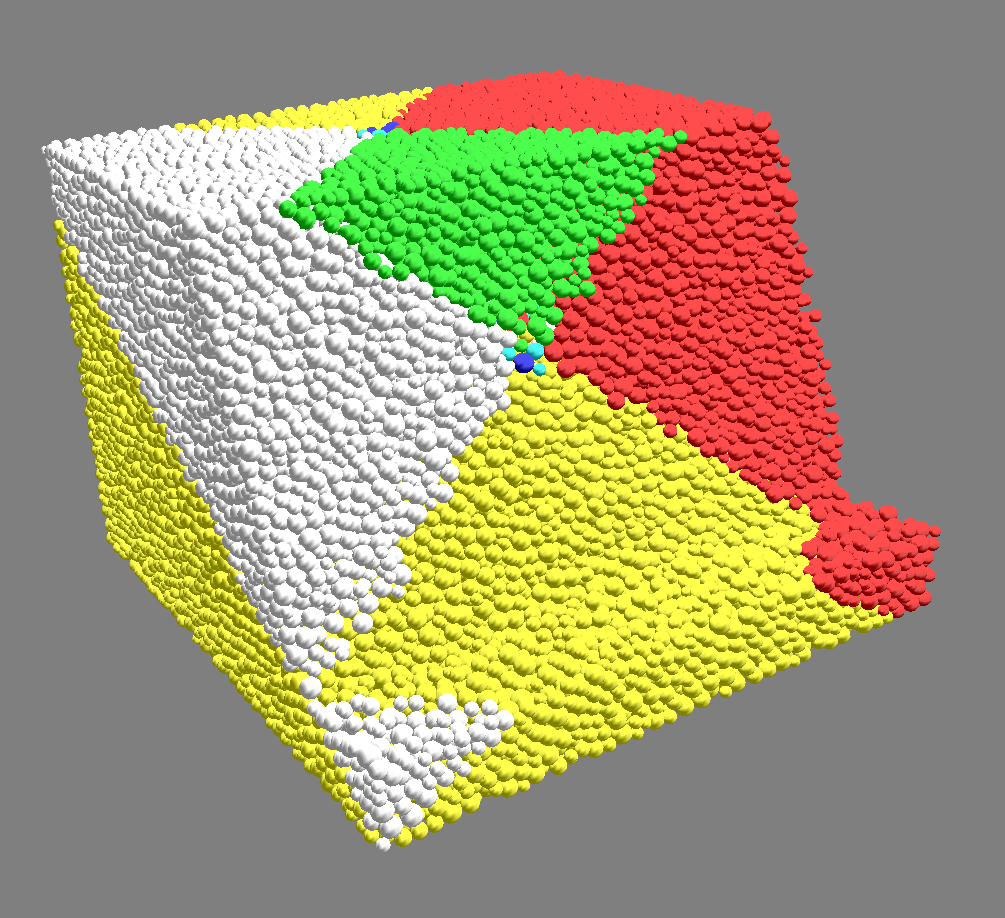
Hi guys, I tried to write some python code to analyse the distribution of fragments produced during one of my simulation. Since it can interest some of you, I wanted to share the first draft. As indicated in the file, I use it with CohesiveFrictionalPM, but it can be easily adapted to every cohesive contact laws. This is really basic stuff due to my still very poor coding knowledge, but I think this kind of feature should be included into the sources. Obviously, any improvement/advice on the code is welcome. In its current form, the script produces a text file where each fragment (cohesive block) is identified with its X,Y,Z dimensions, as well as the number of particles involved and the corresponding volume. I have attached an example of the results (picture+text file) obtained for a slope stability simulation involving a wedge formed by two discontinuity planes. If you think this could be useful in YADE, maybe we could include a function in yade.utils with few more lines to plot the corresponding distribution curve. Cheers Luc
Attachment:
WedgeIdentification.png
Description: PNG image
Attachment:
wedgeFragmentDistribution.spheres
Description: Binary data
# -*- coding: utf-8 -*-
# encoding: utf-8
## THSI SCRIPT PRODUCES A TEXT FILE GIVING THE DISTRIBUTION SIZE OF FRAGMENTS (VALID FOR COHESIVE CONTACT LAWS, WRITTEN HERE FOR CFpm WHERE isCohesive INDICATES IF AN INTERACTION IS COHESIVE OR NOT)
### load simulation
O.load('wedge.xml')
######################################################################################
nbFragments=0
fragments=particles=[] # fragments not used here because some pb. The idea was to stock ID depending on the fragment to which they belong (see line 63 for pb)
color=[0.,0.,0.]
a=b=0
colorInc=1.0
## initialize if some bodies are non dynamic (isDynamic is used to determine if particles have already been checked)
for o in O.bodies :
o.isDynamic=True
o.shape.color=color
### to clean the file (other way?)
outFile=open('fragmentDistribution.spheres','w')
outFile.close()
outFile=open('fragmentDistribution.spheres','a')
outFile.write('# Id_nbPart_X_Y_Z_V' + '\n')
for o in O.bodies :
if o.shape.name=='Sphere' and o.isDynamic==True :
del particles[:]
## color setting (EXPERIMENTAL-> probably something cleaner to do here)
if color[a]>=1 :
a+=1
if a>2 :
b+=1
color=[0.,0.,0.]
a=b
if b>2 :
color=[0.,0.,0.]
a=0
b=0
color[a]=color[a]+colorInc
nbFragments+=1
print 'fragment ID=', nbFragments, ' | color=', color
particles.append(o.id)
o.isDynamic=False #marked
o.shape.color=color
for c in particles :
for i in O.interactions.withBody(c) :
if i.phys.isCohesive :
if i.id1==c and O.bodies[i.id2].isDynamic==True :
particles.append(i.id2)
O.bodies[i.id2].isDynamic=False
O.bodies[i.id2].shape.color=color
elif i.id2==c and O.bodies[i.id1].isDynamic==True :
particles.append(i.id1)
O.bodies[i.id1].isDynamic=False
O.bodies[i.id1].shape.color=color
#fragments.append(particles) # does not work since del particles[:] seems to delete fragments components too
xmin=ymin=zmin=1000
xmax=ymax=zmax=0
nbParticles=X=Y=Z=V=0
for p in particles :
nbParticles+=1
V+=1.333*3.14*pow(O.bodies[p].shape.radius,3)
if O.bodies[p].state.pos[0]<xmin :
xmin=O.bodies[p].state.pos[0]-O.bodies[p].shape.radius
if O.bodies[p].state.pos[0]>xmax :
xmax=O.bodies[p].state.pos[0]+O.bodies[p].shape.radius
if O.bodies[p].state.pos[1]<ymin :
ymin=O.bodies[p].state.pos[1]-O.bodies[p].shape.radius
if O.bodies[p].state.pos[1]>ymax :
ymax=O.bodies[p].state.pos[1]+O.bodies[p].shape.radius
if O.bodies[p].state.pos[2]<zmin :
zmin=O.bodies[p].state.pos[2]-O.bodies[p].shape.radius
if O.bodies[p].state.pos[2]>zmax :
zmax=O.bodies[p].state.pos[2]+O.bodies[p].shape.radius
X=xmax-xmin
Y=ymax-ymin
Z=zmax-zmin
outFile.write('%g\t%g\t%g\t%g\t%g\t%g\n'%(nbFragments,nbParticles,X,Y,Z,V))
print 'nbFragments=', nbFragments
outFile.close()
################################################################################
## graphical interface
from yade import qt
qt.Controller()
v=qt.View()
renderer=qt.Renderer()
renderer.bgColor=(0.5,0.5,0.5)
| Thread Previous • Date Previous • Date Next • Thread Next |
{kind=link}