| Thread Previous • Date Previous • Date Next • Thread Next |
Hi Andy,
thanks for raising the question. Sometimes it is important to
check the correctness of basic functionality.
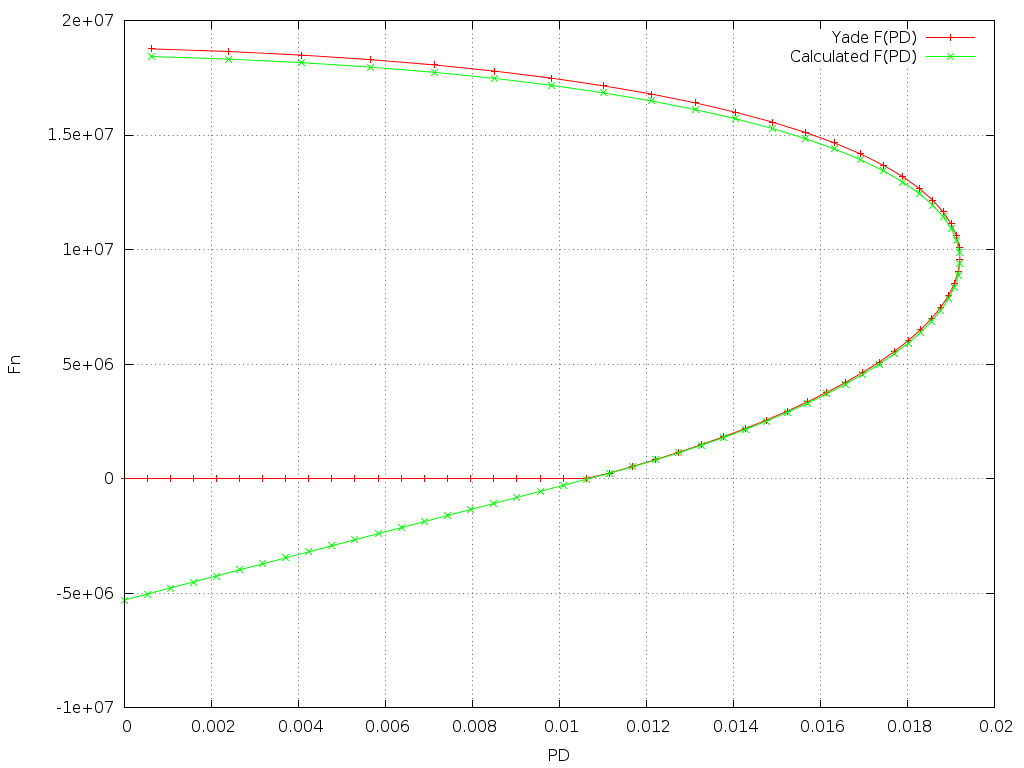
See an attached, slightly modified, script and diagram. I put the first
particle (upper) not at the height 10m, but directly on the
border of the second one, adding an initial velocity, which
is almost the same, like you have before the impact. Also I have
added the plot function, so you can see all parameters during simulation.
As you can see, there are no attractive forces, if there is no penetration.
The normal force is 0.
Regards
Anton
2014-05-20 21:26 GMT+02:00 Andy Torres <question248996@xxxxxxxxxxxxxxxxxxxxx>:
> Question #248996 on Yade changed:
> https://answers.launchpad.net/yade/+question/248996
>
> Andy Torres posted a new comment:
> Hi Anton,
> thanks for the quick anser. In the code, there is an "if"
> l.35 if (computeForceTorqueViscEl(_geom, _phys, I, force, torque1, torque2) and (I->isActive)) {...}
> l.44 else {scene->interactions->requestErase(I); return;}
> should this lines remove the interaction? (if so, seems like its not working)
> why YADE keep the interaction when the particles are not in contact?
>
>
> i just try this code:(with yadedaily Yade 1.07.0-116-c00c469~jessie)
>
> #!/usr/bin/env python
> # -*- coding: utf-8 -*-
> from ya#!/usr/bin/env python
> # -*- coding: utf-8 -*-
> from yade import pack, plot
> import numpy as np
>
> Corr='-test'
>
> Arch1='energ'+Corr+'.out'
> deltaT=5e-5
> grav=-9.81
> zi=10.0
> sumado=Vector3(0.0,0.0,.0)
> # "PARTÍCULAS"
> idmatVisEl=O.materials.append(ViscElMat(kn=1e9,cn=300e4,ks=1.4e4,cs=200e4,frictionAngle=0.36,label='matVisEl'))
>
> EsfMo = O.bodies.append([utils.sphere(center=(0,0,zi),material='matVisEl', radius=1.0,fixed=False)])
> EsFix = O.bodies.append([utils.sphere(center=(0,0,0), material='matVisEl',radius=1.0,fixed=True)])
>
> O.engines=[
> ForceResetter(),
> InsertionSortCollider([Bo1_Sphere_Aabb(),Bo1_Facet_Aabb()]),
> InteractionLoop(
> [Ig2_Sphere_Sphere_ScGeom(),Ig2_Facet_Sphere_ScGeom()],
> [Ip2_ViscElMat_ViscElMat_ViscElPhys()],
> [Law2_ScGeom_ViscElPhys_Basic()]
> ),
> NewtonIntegrator(gravity=(0,0,grav),damping=0.0),
> PyRunner(command='dissip(sumado)',iterPeriod=1,label='potDisip'),#Cuando comienzo a calcular las interacciones
> ]
> def dissip(sumado):
> g = open (Arch1,'a')
> v=O.bodies[0].state.vel[2]
> z=O.bodies[0].state.pos[2]
> m=O.bodies[0].state.mass
> Fn=0.0
> for i in O.interactions:
> PD=i.geom.penetrationDepth
> YFn=i.phys.normalForce
> Fn=YFn[2]
> g.write(str(O.iter)+'\t'+str(z)+'\t'+str(v)+'\t'+'\t'+str(Fn)+'\t'+str(PD)+'\n')
> g.closed
> O.dt=deltaT
> O.saveTmp()de import pack, plot
> import numpy as np
>
> Corr='-test'
>
> Arch1='energ'+Corr+'.out'
> deltaT=5e-5
> grav=-9.81
> zi=10.0
> sumado=Vector3(0.0,0.0,.0)
> # "PARTÍCULAS"
> idmatVisEl=O.materials.append(ViscElMat(kn=1e9,cn=300e4,ks=1.4e4,cs=200e4,frictionAngle=0.36,label='matVisEl'))
>
> EsfMo = O.bodies.append([utils.sphere(center=(0,0,zi),material='matVisEl', radius=1.0,fixed=False)])
> EsFix = O.bodies.append([utils.sphere(center=(0,0,0), material='matVisEl',radius=1.0,fixed=True)])
>
> O.engines=[
> ForceResetter(),
> InsertionSortCollider([Bo1_Sphere_Aabb(),Bo1_Facet_Aabb()]),
> InteractionLoop(
> [Ig2_Sphere_Sphere_ScGeom(),Ig2_Facet_Sphere_ScGeom()],
> [Ip2_ViscElMat_ViscElMat_ViscElPhys()],
> [Law2_ScGeom_ViscElPhys_Basic()]
> ),
> NewtonIntegrator(gravity=(0,0,grav),damping=0.0),
> PyRunner(command='dissip(sumado)',iterPeriod=1,label='potDisip'),#Cuando comienzo a calcular las interacciones
> ]
> def dissip(sumado):
> g = open (Arch1,'a')
> v=O.bodies[0].state.vel[2]
> z=O.bodies[0].state.pos[2]
> m=O.bodies[0].state.mass
> Fn=0.0
> for i in O.interactions:
> PD=i.geom.penetrationDepth
> YFn=i.phys.normalForce
> Fn=YFn[2]
> g.write(str(O.iter)+'\t'+str(z)+'\t'+str(v)+'\t'+'\t'+str(Fn)+'\t'+str(PD)+'\n')
> g.closed
> O.dt=deltaT
> O.saveTmp()
>
> and using gnuplot, i plot:
>
> Kn=5e8
> cn=1.5e6
> dt=5e-5
> m=4188.79
> g=9.81
> set term wxt 0
> #set terminal eps
> #set output "NormalForce.eps"
> set title "Penetration Depth, normal Velcity and Force Vs time"
> set xrange[25000:45000]
> set grid
> plot \
> "energ-test.out" every 15 u 1:($5) ps 0.5 pt 1 title "PD",\
> "energ-test.out" every 15 u 1:($3/100) ps 0.5 title "normVel/100",\
> "energ-test.out" every 25 u 1:($4/1e8) ps 0.5 pt 1 title "Fn from yade/1e8",\
> "energ-test.out" every 25 u 1:((-$5*Kn+$3*cn)/1e8) ps 0.5 pt 4 title "(calculated Fn=-PD*Kn+normVel*Cn)/1e8"
>
> Regards,
> Andy
>
> --
> You received this question notification because you are a member of
> yade-users, which is an answer contact for Yade.
>
> _______________________________________________
> Mailing list: https://launchpad.net/~yade-users
> Post to : yade-users@xxxxxxxxxxxxxxxxxxx
> Unsubscribe : https://launchpad.net/~yade-users
> More help : https://help.launchpad.net/ListHelp
Attachment:
dia.png
Description: PNG image
Attachment:
sim-data_Sphere.data.bz2
Description: BZip2 compressed data
Attachment:
sim-data_Sphere_ant.gnuplot
Description: application/gnuplot
#!/usr/bin/env python
# -*- coding: utf-8 -*-
from yade import pack, plot
import numpy as np
Corr='-test'
Arch1='energ'+Corr+'.out'
deltaT=5e-5
grav=-9.81
zi=10.0
sumado=Vector3(0.0,0.0,.0)
# "PARTÍCULAS"
idmatVisEl=O.materials.append(ViscElMat(kn=1e9,cn=300e4,ks=1.4e4,cs=200e4,frictionAngle=0.36,label='matVisEl'))
EsfMo = O.bodies.append(utils.sphere(center=(0,0,2.0),material='matVisEl', radius=1.0,fixed=False))
EsFix = O.bodies.append(utils.sphere(center=(0,0,0), material='matVisEl',radius=1.0,fixed=True))
O.bodies[EsfMo].state.vel=Vector3(0,0,-12.528367)
O.engines=[
ForceResetter(),
InsertionSortCollider([Bo1_Sphere_Aabb(),Bo1_Facet_Aabb()]),
InteractionLoop(
[Ig2_Sphere_Sphere_ScGeom(),Ig2_Facet_Sphere_ScGeom()],
[Ip2_ViscElMat_ViscElMat_ViscElPhys()],
[Law2_ScGeom_ViscElPhys_Basic()]
),
NewtonIntegrator(gravity=(0,0,grav),damping=0.0),
PyRunner(command='dissip(sumado)',iterPeriod=1,label='potDisip'),#Cuando comienzo a calcular las interacciones
PyRunner(command='addPlotData()',iterPeriod=1),
]
from yade import qt
qt.View()
# Function to add data to plot
def addPlotData():
posZ = O.bodies[EsfMo].state.pos[2]
velZ = O.bodies[EsfMo].state.vel[2]
PDcalc = 2.0 - posZ
PDgeom = 0.0
try:
PDgeom = O.interactions[0,1].geom.penetrationDepth
except:
pass
Fn = 0.0
try:
Fn = O.interactions[0,1].phys.normalForce[2]
except:
pass
FnCalculated = 5e8*PDgeom - 1.5e6*velZ
plot.addData(it1=O.iter, it2=O.iter, it3=O.iter, PDcalc = PDcalc, PDgeom = PDgeom, velZ = velZ, Fn = Fn, FnYade = -Fn, FnCalculated = FnCalculated)
plot.plots={'it1':('PDcalc','PDgeom'), 'it2':('velZ'), 'it3':('Fn'), 'PDgeom':('FnCalculated', 'FnYade')}; plot.plot()
def dissip(sumado):
g = open (Arch1,'a')
v=O.bodies[0].state.vel[2]
z=O.bodies[0].state.pos[2]
m=O.bodies[0].state.mass
Fn=0.0
for i in O.interactions:
PD=i.geom.penetrationDepth
YFn=i.phys.normalForce
Fn=YFn[2]
g.write(str(O.iter)+'\t'+str(z)+'\t'+str(v)+'\t'+'\t'+str(Fn)+'\t'+str(PD)+'\n')
g.closed
O.dt=deltaT
O.run(200, True)
O.wait
plot.saveGnuplot('sim-data_Sphere')
| Thread Previous • Date Previous • Date Next • Thread Next |
{kind=link}