yade-users team mailing list archive
-
 yade-users team
yade-users team
-
Mailing list archive
-
Message #03401
Re: Elastic energy
-
To:
yade-users@xxxxxxxxxxxxxxxxxxx
-
From:
Janek Kozicki <janek_listy@xxxxx>
-
Date:
Mon, 5 Jul 2010 16:38:41 +0200
-
Face:
iVBORw0KGgoAAAANSUhEUgAAADAAAAAwBAMAAAClLOS0AAAALVBMVEUBAQEtLS1KSkpRUVFXV1dYWFhjY2Nzc3N3d3eHh4eKioqdnZ24uLjLy8vc3NxVIagyAAAACXBIWXMAAAsTAAALEwEAmpwYAAAAB3RJTUUH2AIVEzgS1fgQtQAAAjRJREFUOMtt1DFv00AUAOAzFQNbjigSyoQaRaBMhKgLUyKXpVNNeUpk9vyDqFJhQ1kiBuaqAwJCqvPtSLY7RlTn5+5IdnYkkt/AOyfxXVLe5vf53Z1875kd34tOEax8djmj6GyjhB5bxz50GdsVZr9fqRjZwAtKOJw5Wqs2MMZ16ALHsaDncF7xAHix1oEFHAB8f+pRjcO4gfZDykcYzbiucRolOLUJ6kjA0xtVt+A6TySlM0RajIpK6DzwKZ/nOYbF/gclHMo1ZOHYY/+Ha+AWuM+3oMS4eeqYzZ8FiCltgUqI8cd2wwAVpJk+8LWYjBtnJdQpHQqJMd4Oxt4bU9ESiFGc5hkqaH74asAX4iabP5I5gZ+qjgGlJCqZa3h3lxhoeVcSE1qLQC4sqKOK9MGW9E3izFqqHokoztLFEgXg31sbZEKnWi2T74A4NxfVQqlkjKtcAWD+zcArFEES01dR0E/nnV0IgugmDd/2L84sOAouRBBHEc7gtc8teDkRlE0iNQPo2w3Xhh/D4TCIQ4LRLoTvgwjj6RRgavdurxYGMaIuGOyAW/PpNlCcU9/93AHenAWYjPoAwa+G3e3to/MgFNTAEKvKDjzuCzHTnY3qqdXtx24VijzQfZ0yewZ5cwRFQaa+mIYr1uI0I76+3W4xhlvoVRwOA0Fdl64HlJnxP6T8YpX/Lga4Wv4A3ErrU5oTfN7Mu/llXMl8RXEPji/lQkN3H7qXqgC2By47EXeU/7PJ/wPxRKMnuZwIeAAAAABJRU5ErkJggg==
-
In-reply-to:
<20100705161525.45d78824@atak.bl.pg.gda.pl>
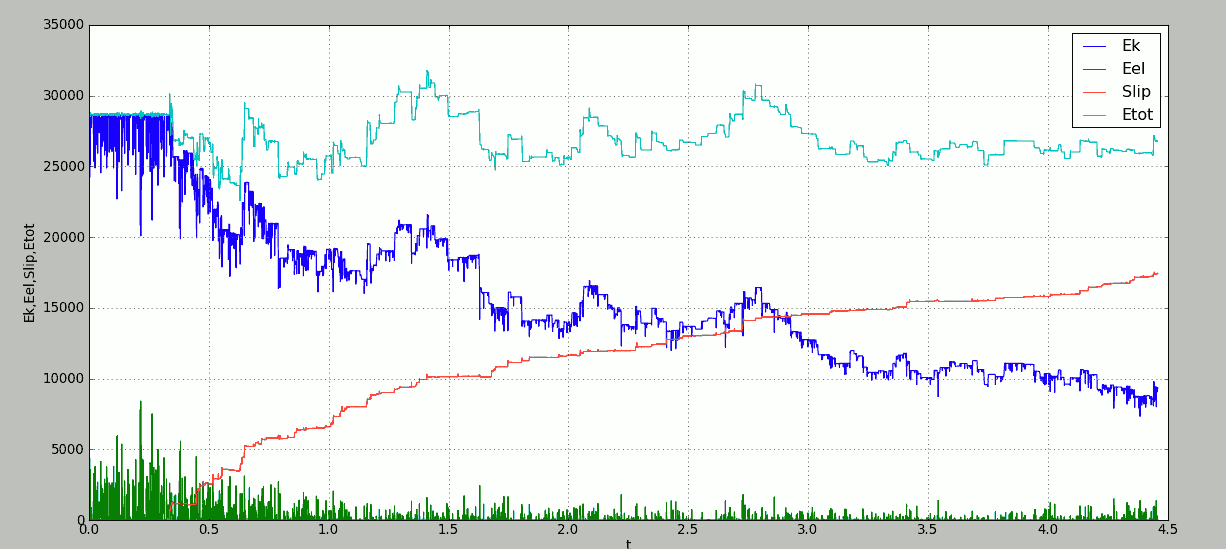
There's definitely a bug hidden somewhere. And it might be not in
plasticDissipation.
See attached picture: it is 140'000 iterations. Total energy is....
not going through the roof. But isn't conserved either. It's just
conserved more or less.
How I did it:
1. I used neverErase flag, because something goes wrong when
interaction breaks. So do not delete it, but only reset Fn=0 and Fs=0.
[Law2_ScGeom_FrictPhys_Basic(label='dry',traceEnergy=True,neverErase=True)]
the neverErase flasg shouldn't change anything in the resulting
graphs of total energy. But evidently it helps! So this is a BUG #1 here.
2. But that total energy is still wrong. It increases, albeit a
little slower. And for some unknown reason using shearDisp helps. As
if the mistake of using shearDisp is correcting another mistake
present somewhere else:
plasticDissipation +=
(-shearDisp - (1/currentContactPhysics->ks)*(trialForce-shearForce))//plastic disp.
.dot(shearForce);//active force
And this is BUG #2
in fact I suppose that BUG#1 == BUG#2 :) But where it is?
--
Janek Kozicki http://janek.kozicki.pl/
Attachment:
scr_3225.png
Description: PNG image
#!/home/janek/bin/yy --threads=1
# -*- coding: utf-8 -*-
# -*- encoding=utf-8 -*-
# Script to monitor the energy of a system
from yade import utils
#-----------------------------------------------------
# material
#-----------------------------------------------------
young=600.0e6
poisson=0.6
density=2.60e3
frictionAngle=radians(0)
O.materials.append(FrictMat(young=young,poisson=poisson,density=density,frictionAngle=frictionAngle,label='mat'))
#-----------------------------------------------------
# geometry
#-----------------------------------------------------
# create a random packing in a box space
from yade import pack
sp=pack.SpherePack()
mn=Vector3(0,0,0)
mx=Vector3(1.0,1.0,1.0)
ntot=10
R=0.1
std=0.0
sp.makeCloud(minCorner=mn,maxCorner=mx,rMean=R,rRelFuzz=std,num=ntot,periodic=False,porosity=0.85)
for s in sp:
O.bodies.append(utils.sphere(s[0],s[1]))
# create some boundaries
wires=True
O.bodies.append(utils.box(center=[-0.1,0.5,0.5],extents=[.0025,1.0,1.0],dynamic=False,wire=wires,material='mat'))
O.bodies.append(utils.box(center=[1.1,0.5,0.5],extents=[.0025,1.0,1.0],dynamic=False,wire=wires,material='mat'))
O.bodies.append(utils.box(center=[1.1/2,-0.1,0.5],extents=[1.0,0.0025,1.0],dynamic=False,wire=wires,material='mat'))
O.bodies.append(utils.box(center=[1.1/2,1.1,0.5],extents=[1.0,0.0025,1.0],dynamic=False,wire=wires,material='mat'))
O.bodies.append(utils.box(center=[0.5,0.5,-0.1],extents=[1.0,1.0,0.0025],dynamic=False,wire=wires,material='mat'))
O.bodies.append(utils.box(center=[0.5,0.5,1.1],extents=[1.0,1.0,0.0025],dynamic=False,wire=wires,material='mat'))
#-----------------------------------------------------
# initial condition (velocities)
#-----------------------------------------------------
v=7.0
for b in O.bodies:
if b.id%2 == 0:
b.state.vel=Vector3(-v,v,-v) # assign an initial velocity
else:
b.state.vel=Vector3(v,-v,v) # assign an initial velocity
#-----------------------------------------------------
# list of engines
#-----------------------------------------------------
O.engines=[
ForceResetter(),
BoundDispatcher([Bo1_Sphere_Aabb(),Bo1_Box_Aabb()]),
InsertionSortCollider(),
InteractionDispatchers(
[Ig2_Sphere_Sphere_ScGeom(),Ig2_Box_Sphere_ScGeom()],
[Ip2_FrictMat_FrictMat_FrictPhys()],
[Law2_ScGeom_FrictPhys_Basic(label='dry',traceEnergy=True,neverErase=True)]
),
NewtonIntegrator(damping=0.0), # *** NO DAMPING ***
PeriodicPythonRunner(iterPeriod=10,command='monitoring()')
]
#-----------------------------------------------------
# time step
#-----------------------------------------------------
O.dt=.1*utils.PWaveTimeStep()
O.saveTmp('init')
from yade import qt
qt.View()
qt.Controller()
#-----------------------------------------------------
# plot some results
#-----------------------------------------------------
from math import *
from yade import plot
plot.plots={'t':('Ek','Eel','Slip','Etot'),'t_':('Slip')}
def monitoring():
plot.addData(Ek=utils.kineticEnergy(),Eel=dry.elasticEnergy(),Slip=dry.plasticDissipation(),t=O.time,t_=O.time,
Etot=utils.kineticEnergy()+dry.elasticEnergy()+dry.plasticDissipation())
O.run(10000,True);
print "\n**** Now friction angle is set from 0 to 25 degrees. ****\n";
O.materials[0].frictionAngle=radians(25)
O.run(130000,True); plot.plot()
Follow ups
References
-
Elastic energy
From: chiara modenese, 2010-07-02
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-02
-
Re: Elastic energy
From: chiara modenese, 2010-07-02
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-04
-
Re: Elastic energy
From: chiara modenese, 2010-07-04
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-04
-
Re: Elastic energy
From: chiara modenese, 2010-07-04
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-04
-
Re: Elastic energy
From: chiara modenese, 2010-07-04
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-04
-
Re: Elastic energy
From: chiara modenese, 2010-07-04
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-04
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-05
-
Re: Elastic energy
From: chiara modenese, 2010-07-05
-
Re: Elastic energy
From: Bruno Chareyre, 2010-07-05
-
Re: Elastic energy
From: Bruno Chareyre, 2010-07-05
-
Re: Elastic energy
From: Janek Kozicki, 2010-07-05
{kind=link}